当協議会は・・・
徳島県でのUAV(ラジコン飛行機、ラジコンヘリ、マルチコプタ、
及び飛行型ドローンなどの無人航空機のことです)の安全な運用方法や利用方法についての協議と実践・研究を行う会です。
実際にUAVを運用しながらの研究を行っていきます。
徳島県でのUAV(ラジコン飛行機、ラジコンヘリ、マルチコプタ、
及び飛行型ドローンなどの無人航空機のことです)の安全な運用方法や利用方法についての協議と実践・研究を行う会です。
実際にUAVを運用しながらの研究を行っていきます。
一般社団法人徳島県ドローン安全協議会






Japan Innovation Challenge 2016 参加報告
徳島大学大学院理工学研究部 三輪昌史
徳島大学大学院理工学研究部 三輪昌史
2016年10月17から21日までの5日間、北海道上士幌町の町有林で、山岳遭難者の探索をテーマにしたコンテストであるJapan Innovation Challenge 2016が開催されました。
このコンテストに、愛知工業大学 奥川准教授、福山大学 沖准教授と大学チームとして、17日と18日の二日間参加してきました。
1.Japan Innovation Challenge 2016 について
・このコンテストは、ロボットによる山での遭難救助をテーマにしたコンテストです。北海道上士幌町の町有林(3km x 3km)を捜索場所とし、以下の三つの課題が提示されました。
・課題1「発見」
実施会場に設置されたマネキンを発見し、位置情報と写真を取得するという課題です。
・課題2「駆付」
レスキューキット(無線機や毛布等を想定した重さ3kgの箱状で主催者より貸与される)をマネキンの周囲3m以内まで運ぶという課題です。
・課題3「救助」
課題3は、マネキンを救助し、スタート地点から10m以内まで搬送するという課題です。
※ 詳しい内容は、コンテストのWebページ(https://www.innovation-challenge.jp/)をご覧下さい。
2.コンテストの実施条件について
コンテストは実際の山林をフィールドとして行われました。競技はロボットで行いますが、フィールドに競技チームは立ち入れません。ロボットの数や種類には制限はありません。各種飛行型ドローン、地上ロボット型ドローンが使用できました。
フィールドは実際の山林です。フィールドはスタート地点より標高が高く、木もありますので目視がききません。
無人航空機を無線操縦するにはきびしい条件です。目視外の飛行・移動が前提となります。そのため、運営委員会はあらかじめ国土交通省に参加チームごとの目視外飛行の許可申請手続きを行いました。
コンテストは、以下のスケジュールで進行しました。
コンテストの開始 午前10時
課題1 開始から60分後まで、また3は参加チームがマネキンを発見した時点で終了
課題2 開始から180分以内(午後1時まで)
課題3 開始から360分以内(午後4時まで)
今回は13チームが参加しましたが、運営側によるチームの電波使用に関する管制は一切ありませんでした。
コンテストの条件としては、非常に厳しいものでした。
まず、コンテストのフィールドは実際の山林であり、探索場所はスタート地点より標高の高い場所です。
無人航空機を使用する場合、目視外への飛行が必要でした。
次に、参加チームが持ち込んだ機材は、DJIの製品が多かったです。そのため、同時に複数の機体が動作することによる電波干渉が予想されました。
※ 三輪は事前に運営委員会に電波管制をするように依頼したのですが、“それも含めてイノベーションを期待したい”との回答で、電波使用についてはルールがない状態でした。

3.コンテスト参加報告
3.1 チーム構成と使用機材
徳島大学・愛知工業大学・福山大学のチーム(以後大学チーム)は、17日と18日の二日間に参加しました。
大学チームのメンバーは、レスキューロボットコンテストの実行委員であり、ロボットを使ったレスキューの方法やレスキューロボットに関する研究を行っています。
今回のコンテストも、その研究の関連として参加しました。また、三輪が無人機の研究をしているので、今回は無人機を使った課題1と課題2に挑戦することにしました。
また、SkyLink社のチームとも協力することになりました。加えて地元の高橋さん、小山さんにいろいろとサポートをしていただきました。
・課題1
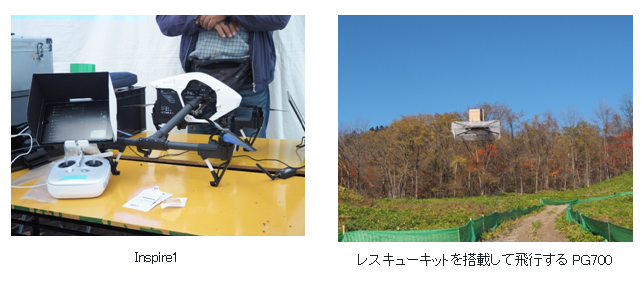
市販の空撮機であるDJI Inspire1を用いました。
Inspire1は、映像通信を使ったFPV(FirstPersonView:一人称視点)操縦と、自動操縦ができます。
・課題2
エンルート PG700を改造し、機体上部にレスキューキットを搭載できるようにした機体を用いました。
この機体には1.2GHzの映像通信機を搭載し、FPV操縦と自動操縦ができるように改造しました。
大学チームのメンバーは、レスキューロボットコンテストの実行委員であり、ロボットを使ったレスキューの方法やレスキューロボットに関する研究を行っています。
今回のコンテストも、その研究の関連として参加しました。また、三輪が無人機の研究をしているので、今回は無人機を使った課題1と課題2に挑戦することにしました。
また、SkyLink社のチームとも協力することになりました。加えて地元の高橋さん、小山さんにいろいろとサポートをしていただきました。
・課題1
市販の空撮機であるDJI Inspire1を用いました。
Inspire1は、映像通信を使ったFPV(FirstPersonView:一人称視点)操縦と、自動操縦ができます。
・課題2
エンルート PG700を改造し、機体上部にレスキューキットを搭載できるようにした機体を用いました。
この機体には1.2GHzの映像通信機を搭載し、FPV操縦と自動操縦ができるように改造しました。
3.2 参加結果
■ 17日
まず、Inspire1にて課題1に挑戦しました。競技開始後、ほとんどのチームが一斉に無人機を離陸させ、捜索を始めました。
それらのうち、多くの機体がInspire1, Phantom4, Matrice100, Matrice600といった、DJI社の製品でした。
そのため、予想されていたことではありますが、離陸地点から500m付近で電波干渉により映像が途切れ、安全装置により自動帰還が開始し、機体が戻ってくる現象が多発しておりました。
大学チームは高台(標462m)からの離陸で、山の起伏を見越してマニュアル操縦を行いました。その時の最大高度は離陸地点からの相対高度で170m程度でした。
二秒間隔での自動撮影をしながらフィールド上を飛行していたのですが、やはり離陸地点から水平距離500m付近で映像や操縦電波が途切れ、自動帰還で機体が返ってきました。
協力チームであるSkyLink社は赤外線カメラを搭載した機体を飛ばしていたのですが、同様に電波干渉により、思ったように捜索ができませんでした。
また、今回のフィールドの大きさに対し、参加チームの無人航空機の飛行時間は、長くても20分程度でした。
そこで大学チームは一度時間をあけ、他のチームの機体が電池交換に戻ってきたところで飛行させたところ、約1kmまで映像や操縦用電波が途切れずに飛行させることができました。
残念ながら、どの参加チームもマネキンを発見することができず、マネキンの座標(緯度経度)が運営から通知されて、課題1は終了しました。
次の課題2に対しては、通知されたマネキンの座標までInspire1を自動航行で飛行させ、まずはマネキンが設置されている場所を観察し、その結果をもとにPG700で「駆付」を行うことにしました。
課題1では複数のDJIの機体により電波干渉がおこり、FPV操縦ができないことがありました。そこで課題2では自動操縦にてマネキン付近までいき、写真撮影をすることにしました。
自動航行にはアプリケーションLitchを用いました。
離陸後に第一点(高度120m)を経由し、第二点の目標地点(高度190m)に向かうプログラムです。
※ 実際に入力したときは、iPadでこの高度に設定しました。
このプログラムでは、自動航行後はその場で待機する設定ですが、通信電波が届かない場合は、GoHome機能で自動的に帰還する設定にしておりました。
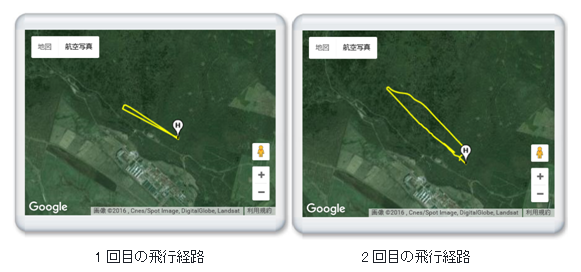
離陸後、順調に飛行していたのですが、次の図の赤丸の地点で通信が途切れました。

記録によると、座標43.294477,143.236066、高度133.3 m(離陸地点からの相対高度)で、通信が切れています。
その後も自動航行をつづけていたと考えられますが、途中で何らかの障害で帰還できなかったようです。
機体は戻ってきませんでしたが、運営から配布されたGPS発信機を搭載していたため、どこにあるかは把握できていました。
次に、PG700にレスキューキットを搭載し、“駆付“を試みたのですが、あいにく雨が降ってきたため中止しました。
17日は他のチームも 「発見」 「駆付」 に成功しておらず、また課題3を実施できるチームはありませんでした。
また、無人航空機同士の接触による墜落や木への衝突による未帰還の機体がでました。装輪の地上ロボットの斜面からの転落も発生しました。
それらのうち、多くの機体がInspire1, Phantom4, Matrice100, Matrice600といった、DJI社の製品でした。
そのため、予想されていたことではありますが、離陸地点から500m付近で電波干渉により映像が途切れ、安全装置により自動帰還が開始し、機体が戻ってくる現象が多発しておりました。
大学チームは高台(標462m)からの離陸で、山の起伏を見越してマニュアル操縦を行いました。その時の最大高度は離陸地点からの相対高度で170m程度でした。
二秒間隔での自動撮影をしながらフィールド上を飛行していたのですが、やはり離陸地点から水平距離500m付近で映像や操縦電波が途切れ、自動帰還で機体が返ってきました。
協力チームであるSkyLink社は赤外線カメラを搭載した機体を飛ばしていたのですが、同様に電波干渉により、思ったように捜索ができませんでした。
また、今回のフィールドの大きさに対し、参加チームの無人航空機の飛行時間は、長くても20分程度でした。
そこで大学チームは一度時間をあけ、他のチームの機体が電池交換に戻ってきたところで飛行させたところ、約1kmまで映像や操縦用電波が途切れずに飛行させることができました。
残念ながら、どの参加チームもマネキンを発見することができず、マネキンの座標(緯度経度)が運営から通知されて、課題1は終了しました。
次の課題2に対しては、通知されたマネキンの座標までInspire1を自動航行で飛行させ、まずはマネキンが設置されている場所を観察し、その結果をもとにPG700で「駆付」を行うことにしました。
課題1では複数のDJIの機体により電波干渉がおこり、FPV操縦ができないことがありました。そこで課題2では自動操縦にてマネキン付近までいき、写真撮影をすることにしました。
自動航行にはアプリケーションLitchを用いました。
離陸後に第一点(高度120m)を経由し、第二点の目標地点(高度190m)に向かうプログラムです。
※ 実際に入力したときは、iPadでこの高度に設定しました。
このプログラムでは、自動航行後はその場で待機する設定ですが、通信電波が届かない場合は、GoHome機能で自動的に帰還する設定にしておりました。
離陸後、順調に飛行していたのですが、次の図の赤丸の地点で通信が途切れました。
記録によると、座標43.294477,143.236066、高度133.3 m(離陸地点からの相対高度)で、通信が切れています。
その後も自動航行をつづけていたと考えられますが、途中で何らかの障害で帰還できなかったようです。
機体は戻ってきませんでしたが、運営から配布されたGPS発信機を搭載していたため、どこにあるかは把握できていました。
次に、PG700にレスキューキットを搭載し、“駆付“を試みたのですが、あいにく雨が降ってきたため中止しました。
17日は他のチームも 「発見」 「駆付」 に成功しておらず、また課題3を実施できるチームはありませんでした。
また、無人航空機同士の接触による墜落や木への衝突による未帰還の機体がでました。装輪の地上ロボットの斜面からの転落も発生しました。
■ 18日
課題1で使用する機体を失いましたので、SkyLink社チームの補助を行いました。
SkyLinkチームはDJI Matrice600に赤外線カメラを搭載していました。捜索対象のマネキンは人の体温と同程度の発熱を行う装置を内蔵しております。
SkyLink社チームは、コンテストの前に実際の森の中にマネキンを設置して上空から撮影したところ、温度分布の違いからマネキンの発見に成功していました。
事前の赤外線カメラによる実験結果から、マネキンの発見は可能だと考えておりました。
しかし18日は天候がよく、木の枝や葉っぱも日光により温度が上昇し、体温と同程度まで温まっている部位が増えていました。
その結果、赤外線カメラによる温度分布の違いからでは発見できませんでした。
課題1は時間切れとなり、マネキンの座標が発表され、課題2が開始となりました。
PG700による「駆付」の準備として、実際にレスキューキットを搭載してホバリングテストを行ったところ、7分以上の飛行時間があることが判明しました。しかし、ホバリングテストの終了後に風が強くなり、飛行はあきらめました。
18日も参加チームによる「発見」「駆付」は成功しておらず、また課題3を実施できるチームはありませんでした。また、未帰還の機体もありました。
大学チームは17日と18日の二日間の参加予定でしたので、残念ながらこれで終了しました。
SkyLinkチームはDJI Matrice600に赤外線カメラを搭載していました。捜索対象のマネキンは人の体温と同程度の発熱を行う装置を内蔵しております。
SkyLink社チームは、コンテストの前に実際の森の中にマネキンを設置して上空から撮影したところ、温度分布の違いからマネキンの発見に成功していました。
事前の赤外線カメラによる実験結果から、マネキンの発見は可能だと考えておりました。
しかし18日は天候がよく、木の枝や葉っぱも日光により温度が上昇し、体温と同程度まで温まっている部位が増えていました。
その結果、赤外線カメラによる温度分布の違いからでは発見できませんでした。
課題1は時間切れとなり、マネキンの座標が発表され、課題2が開始となりました。
PG700による「駆付」の準備として、実際にレスキューキットを搭載してホバリングテストを行ったところ、7分以上の飛行時間があることが判明しました。しかし、ホバリングテストの終了後に風が強くなり、飛行はあきらめました。
18日も参加チームによる「発見」「駆付」は成功しておらず、また課題3を実施できるチームはありませんでした。また、未帰還の機体もありました。
大学チームは17日と18日の二日間の参加予定でしたので、残念ながらこれで終了しました。
4.未帰還機体の状況について
帰還しなかったInspire1には運営委員会から貸与していただいたGPS発信機をとりつけていましたので、機体のある場所はわかったそうです。19日に回収していただきました。その時の機体の写真を以下に示します。



18日の夜に雨が降ったので、電装系は故障している可能性が高いです。
墜落の原因について考察してみます。17日の課題1では機体は高台(標462m)から離陸し、山の起伏を見越してマニュアル操縦を行いました。その時の最大高度は170m程度でした。一方、課題2のスタート地点の標高は441mでした。約20mの差があります。
この標高の差を見越して、課題2で実施した自動操縦では目標地点の高度を190mに設定したのですが、実際には足りなかったのではないかと思います。高度不足で途中の木に衝突した可能性があります。GoogleEarthなりで調べて高度を設定するべきでした。
現在、メーカーに修理を依頼しております。また、搭載カメラの映像が届けば、詳細がわかると思います。新しい情報がわかり次第報告いたします。
18日の夜に雨が降ったので、電装系は故障している可能性が高いです。
墜落の原因について考察してみます。17日の課題1では機体は高台(標462m)から離陸し、山の起伏を見越してマニュアル操縦を行いました。その時の最大高度は170m程度でした。一方、課題2のスタート地点の標高は441mでした。約20mの差があります。
この標高の差を見越して、課題2で実施した自動操縦では目標地点の高度を190mに設定したのですが、実際には足りなかったのではないかと思います。高度不足で途中の木に衝突した可能性があります。GoogleEarthなりで調べて高度を設定するべきでした。
現在、メーカーに修理を依頼しております。また、搭載カメラの映像が届けば、詳細がわかると思います。新しい情報がわかり次第報告いたします。
5.今回のコンテストについて
コンテストは今回が初めての開催であり、運営側にも問題があったと思います。三輪が感じた問題点について述べます。
まず、レスキューを題材とした本コンテストですが、参加チームが協力ではなく競争する形式になっていました。実際のレスキューで競争はないと思います。
例えば、レスキューロボットコンテストでは、競技において参加チーム間で通信を行い、レスキューロボットの通行に関する打ち合わせや救助に関する情報交換を行うようになっています。競技とはいえ、レスキュー活動に競争の考えを入れるのはおかしいと思います。
また、競争の形式をとっていることから、参加チーム間の情報交換も少なかったと思います。いろいろな失敗について、一日ごとにチーム間での情報交換の場が用意されていれば、捜索活動の効率化や未帰還機の発生の防止ができたのではないかと思います。
また、このコンテストはレスキューに関するイノベーションを喚起することが目的となっていますが、そのために電波管理を行っていません。実際の災害現場において、複数の無人航空機やロボットを運用する場合、それらが使用する電波について管制を行わないと、通信障害発生の可能性がありますし、それによる事故も起こりかねません。また、警察や消防の活動に対する妨害になる可能性があります。
他のチームと干渉しないような電波を使用する電波機器を開発使用する場合も考えられますが、現在の電波法の中では購入・使用できる機器は限られますし、新しい電波機器の開発は簡単にできるものではありませんし、また許可申請にも時間がかかります。そうゆう意味では、あまり現実的な設定ではないと思います。
これら二点も影響していると思うのですが、コンテストの期間中に多数の未帰還機が発生しました。またそれらのほとんどは回収できたのですが、2機は未回収だそうです。実施環境が厳しい中、競争となり情報交換もなければ、未帰還が続出すると思います。
次にコンテストの良かった点を述べます。
実際の山林を使用したコンテストしては、非常に意義があったと思います。運営委員会は、チームが使用するインフラ(テント、電力、NTTdocomoの電話回線、トイレ、GPS発信機)の整備など、コンテスト運営に関しての準備と実施は素晴らしいものでした。また、場所の提供や未帰還機の捜索を行っていただいた上士幌町の皆さん・町役場の皆さんには感謝しております。問題や複数の未帰還機がありましたが、実践的なコンテストでよかったと思います。また、コンテスト中は天候的にはほとんど穏やかでよかったと思います。コンテストの開催が一週間遅れていたら、雪と風で無人航空機は使用できなかったと思います。 なお、来年も第二回が開催されるようです。
まず、レスキューを題材とした本コンテストですが、参加チームが協力ではなく競争する形式になっていました。実際のレスキューで競争はないと思います。
例えば、レスキューロボットコンテストでは、競技において参加チーム間で通信を行い、レスキューロボットの通行に関する打ち合わせや救助に関する情報交換を行うようになっています。競技とはいえ、レスキュー活動に競争の考えを入れるのはおかしいと思います。
また、競争の形式をとっていることから、参加チーム間の情報交換も少なかったと思います。いろいろな失敗について、一日ごとにチーム間での情報交換の場が用意されていれば、捜索活動の効率化や未帰還機の発生の防止ができたのではないかと思います。
また、このコンテストはレスキューに関するイノベーションを喚起することが目的となっていますが、そのために電波管理を行っていません。実際の災害現場において、複数の無人航空機やロボットを運用する場合、それらが使用する電波について管制を行わないと、通信障害発生の可能性がありますし、それによる事故も起こりかねません。また、警察や消防の活動に対する妨害になる可能性があります。
他のチームと干渉しないような電波を使用する電波機器を開発使用する場合も考えられますが、現在の電波法の中では購入・使用できる機器は限られますし、新しい電波機器の開発は簡単にできるものではありませんし、また許可申請にも時間がかかります。そうゆう意味では、あまり現実的な設定ではないと思います。
これら二点も影響していると思うのですが、コンテストの期間中に多数の未帰還機が発生しました。またそれらのほとんどは回収できたのですが、2機は未回収だそうです。実施環境が厳しい中、競争となり情報交換もなければ、未帰還が続出すると思います。
次にコンテストの良かった点を述べます。
実際の山林を使用したコンテストしては、非常に意義があったと思います。運営委員会は、チームが使用するインフラ(テント、電力、NTTdocomoの電話回線、トイレ、GPS発信機)の整備など、コンテスト運営に関しての準備と実施は素晴らしいものでした。また、場所の提供や未帰還機の捜索を行っていただいた上士幌町の皆さん・町役場の皆さんには感謝しております。問題や複数の未帰還機がありましたが、実践的なコンテストでよかったと思います。また、コンテスト中は天候的にはほとんど穏やかでよかったと思います。コンテストの開催が一週間遅れていたら、雪と風で無人航空機は使用できなかったと思います。 なお、来年も第二回が開催されるようです。
6.次回コンテストに向けて
今回のコンテストにおいては、大学チームでは以下の技術的な問題がありました。
・映像電波・操縦用電波の干渉
・自動操縦時の航路設定
・雨および強風時の飛行
次回のコンテストには、これらの問題点についての対応策を実装した機体を用意します。
また、地上ロボットにおる救助の実施についても準備を進めていきます。
・映像電波・操縦用電波の干渉
・自動操縦時の航路設定
・雨および強風時の飛行
次回のコンテストには、これらの問題点についての対応策を実装した機体を用意します。
また、地上ロボットにおる救助の実施についても準備を進めていきます。